M62Z528707
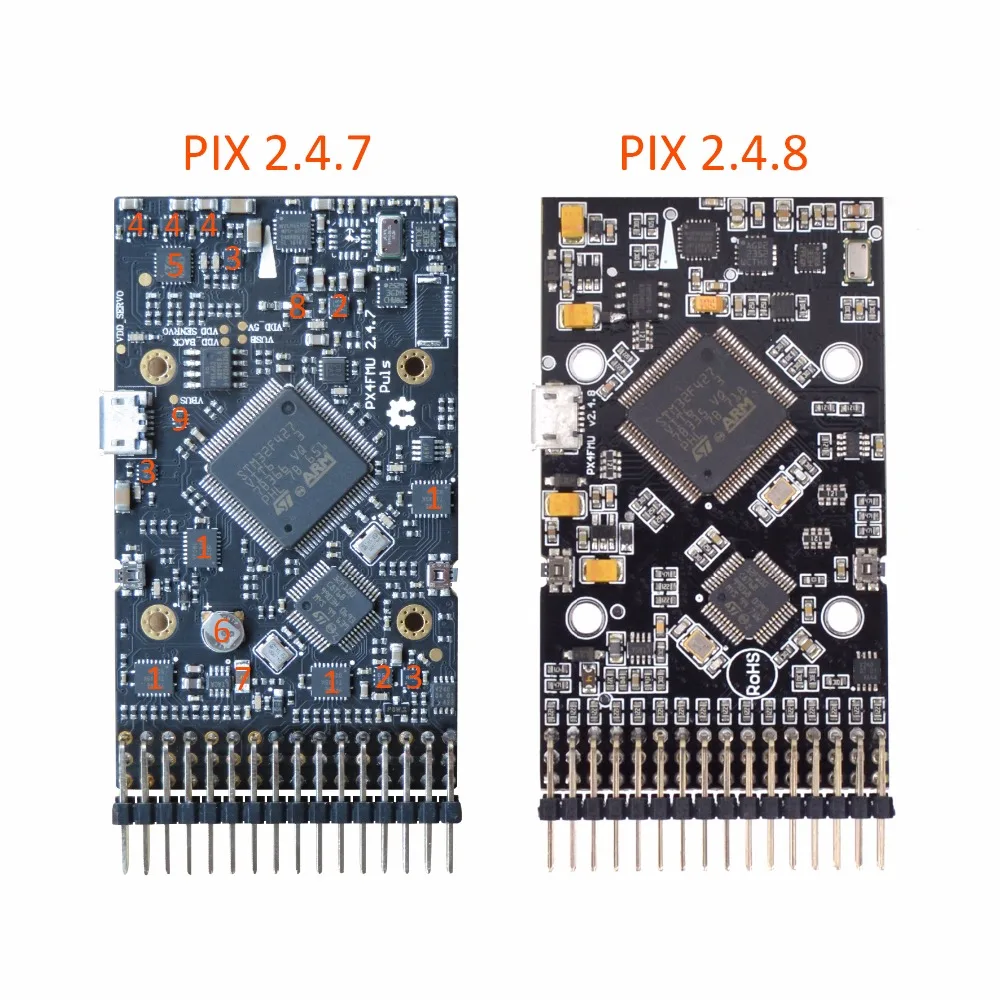
Pixhawk PX4 2.4.8 32 bit ARM PX4FMU PX4IO
Description
Pixhawk PX4 pilote automatique PIX 2.4.8 contrôleur de vol 32 bits avec interrupteur de sécurité et sonnerie pour multi-rotor quadricopter RC
Caractéristiques:
Compatible avec Alexmos2.2 ou firmware ci-dessous, compatible avec le dernier firmware BruGi_050 Allemand, Russian2.2 firmwareTips
Une nouvelle génération de processeur 32 bits à contrôle d'entrée puissant, une carte de circuit imprimé avec PX4FMU + PX4IO
Spécifications:
Contrôleur de vol à Code ouvert pour pilote automatique Pixhawk PX4 32 bits V2.4.8 W/commutateur de sécurité pour sonnette
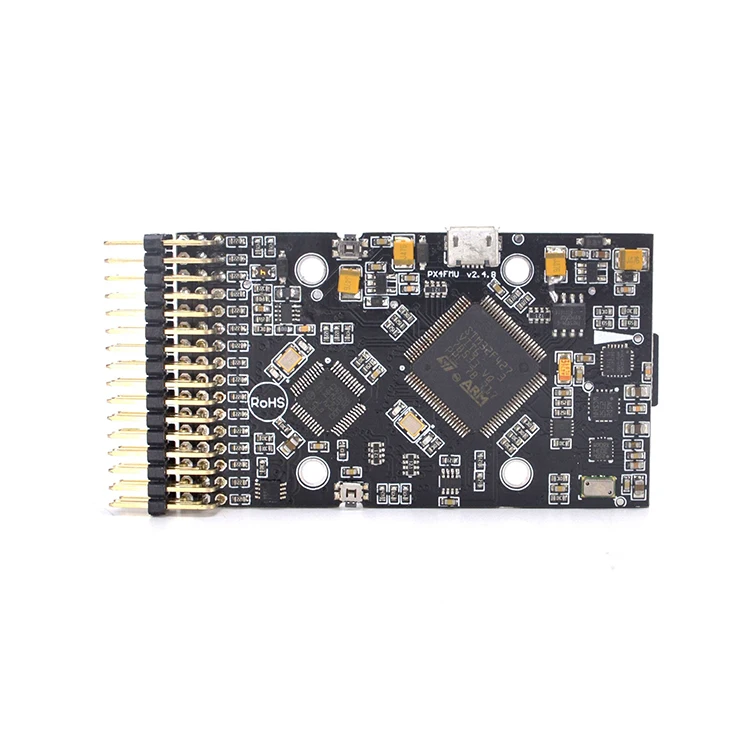
Processeur
2 bits 1.32 STM32F427 flash Cortex M4, avec l'unité de traitement de matériel à virgule flottante
2 fréquence principale: 256 K, RAM 168 MHZ
Processeur 3.32 bits STM32F103 sauvegarde co
Capteur:
1. gyroscope numérique 3 axes 16 bits L3GD20
2. Magnétomètre accéléromètre à 14/3 axes LSM303D
3. Accéléromètre/magnétomètre à 6 axes MPU6000
4. MS5611 baromètre de haute précision
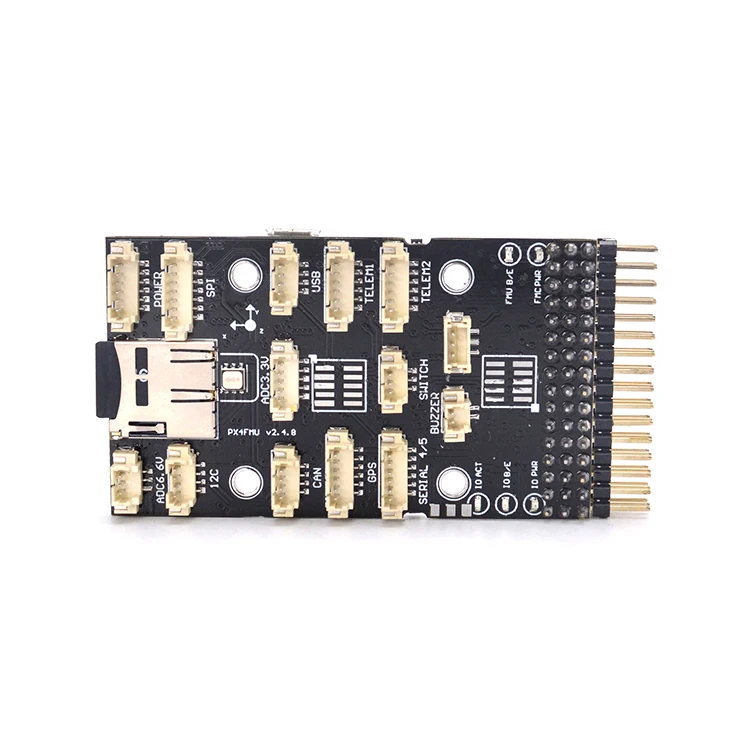
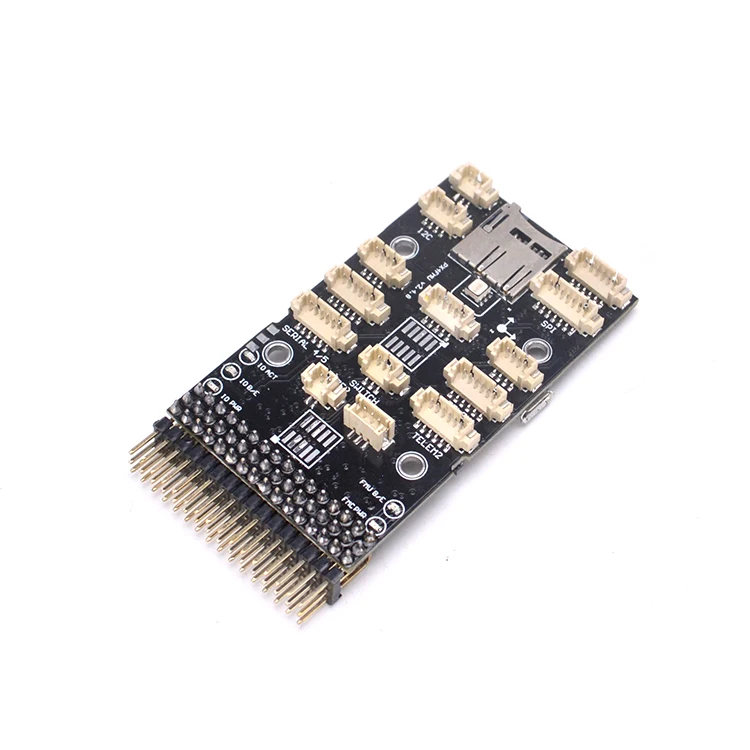
Interface:
1.5 UART 1 haute tension compatible, 2 avec contrôle de débit matériel
2.2 PEUT
DSM/DSM-X 3. Entrée de récepteur satellite compatible Spektrum
Entrée et sortie SBUS 4. Futaba compatibles
5. Entrée de signal PPM
6. RSSI (PWM ou tension d'entrée)
7. I2C
8. SPI
9.3.3 et 6.6 entrées VADC
10 externes NOUS MICRO
Liste de colisage:
Pixhawk 2.4.8 contrôleur de vol à bras 32bit x 1
Bouton de sécurité x 1
Buzzer x 1
Carte TF 8G (le micrologiciel IO a écrit) x1
RVB module × 1
PIX 2.4.8 est une version simplifiée de bricolage, si vous avez besoin de verison PIX 2.4.7 standard, s'il vous plaît acheter ici.